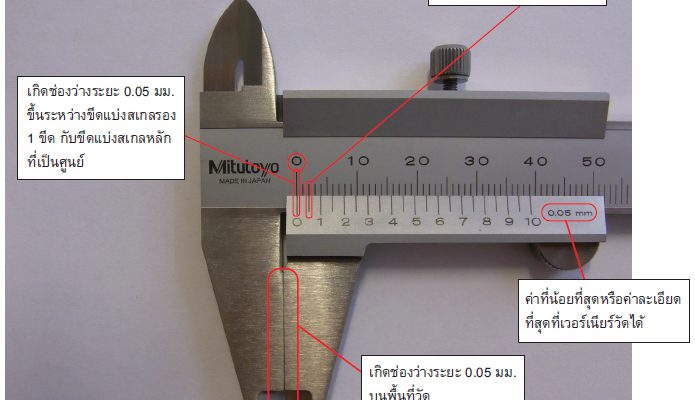
ในภาพที่ 4 แสดงภาพขยายใหญ่ของเวอร์เนียร์กับขีดแบ่งสเกลรอง (ขีดแบ่งสเกลรองถูกเรียกได้ว่า ขีดแบ่งสเกลเวอร์เนียร์เช่นกัน) เวอร์เนียร์มีกลไกในการอ่านค่าที่วัดได้โดยดูสเกลหลักและขีดแบ่ง สเกลรองทั้งสองอย่าง ในส่วนนี้จะอธิบายถึงหลักการในการวัดของเวอร์เนียร์อย่างง่ายให้ทราบ หากปรับให้สเกลหลักและขีดแบ่งสเกลรองเลขศูนย์ตรงกันแล้วจะเห็นได้ว่า ค่า 10 ของขีดแบ่งสเกล ของตรงกับ 39 มม. ของสเกลหลัก ขีดแบ่งสเกลรองเป็นขีดแบ่งที่แบ่ง 0-10 ออกเป็น 20 ช่อง ค่าของขีด แบ่งสเกลรอง 1 ขีดจึงเป็นค่าที่แบ่ง 39 มม. ออกเป็น 20 ส่วน ซึ่งก็คือ 1.95 มม. หมายความว่าจะเกิด ช่องว่างระยะ 0.05 มม. ขึ้นระหว่างขีดแบ่งสเกลรอง 1 ขีดกับสเกลหลัก 2 มม. นั่นเอง ในส่วนนี้ ถ้าปรับขีดแบ่งสเกลรองขีดแรกให้ตรงกับสเกลหลัก 2 มม. ตามภาพที่ 5 จะทราบโดยง่ายว่า ช่องว่างไม่ตรงกันอยู่แล้วจึงเกิดช่องว่าง 0.05 มม. ที่ด้านวัดภายนอก กล่าวคือสำหรับเวอร์เนียร์ที่แสดง อยู่ในภาพนี้จะสามารถวัดค่าได้ละเอียดถึงระยะ 0.05 มม. ตามที่มีรอยพิมพ์ประทับไว้ว่า 0.05 มม. บริเวณด้านขวาของสเกลเลื่อน เวอร์เนียร์สามารถนำระยะส่วนต่างของขีดแบ่งสเกลหลักและขีดแบ่งสเกลรองมาใช้ในการวัดหลักที่ ตํ่ากว่าทศนิยมได้ดังที่กล่าวไป นี่คือหลักการในการวัดของเวอร์เนียร์นั่นเอง Columnชื่อเรียกภาษาอังกฤษของเวอร์เนียร์ (เวอร์เนียร์คาลิปเปอร์ : Vernier caliper)“Nonius” เป็นชื่อเรียกที่มีแค่คนญี่ปุ่นเท่านั้นที่เข้าใจ ในอเมริกาถูกเรียกว่า “เวอร์เนียร์คาลิปเปอร์” คำว่า “เวอร์เนียร์” มาจากชื่อของผู้คิดค้นขีดแบ่งสเกลเวอร์เนียร์ที่ประยุกต์มากจากเครื่องวัด (ปิแอร์เวอร์เนียร์ : Pierre Vernier : ค.ศ. 1580-1637 : ฝรั่งเศส) ส่วน “คาลิปเปอร์” หมายถึง “อุปกรณ์ปากวัดงานที่สามารถวัดมิติจำพวกเส้นผ่าศูนย์กลางโดยใช้งานสเกลเลื่อน 2 ชิ้นหนีบคั่น”