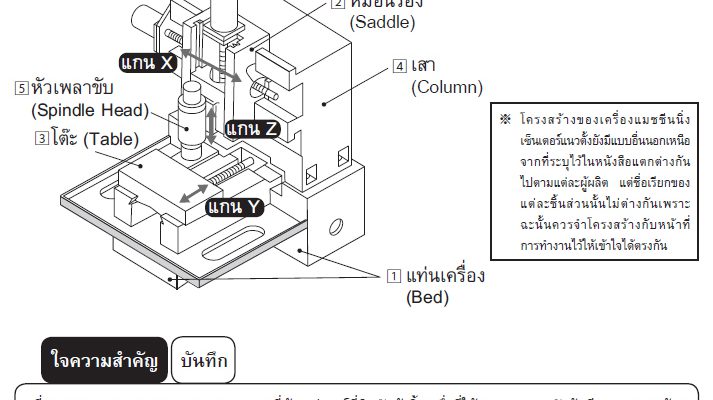
1 โครงสร้าง เครื่องแมชชีนนิ่งเซ็นเตอร์ทั่วไปจะมีฝาครอบเครื่องอยู่ทำให้มองไม่เห็นโครงสร้างด้านใน (โครงเหล็ก) เครื่องแมชชีนนิ่ง เซ็นเตอร์ในปัจจุบันมีการปรับฝาครอบให้ดูดีขึ้นและยังมีแผงควบคุมเป็นหน้าจอสัมผัสอีกด้วย หลายคนจึงนึกภาพคิด ว่าเป็นเครื่องมือกลรุ่นใหม่ แต่หากถอดฝาครอบออกโดยพื้นฐานแล้วก็ไม่ต่างไปจากเครื่องกัดทั่วไปมากเลย ฝาครอบ ของเครื่องแมชชีนนิ่งเซ็นเตอร์เรียกว่า “Splash Guard” โครงสร้างของเครื่องแมชชีนนิ่งเซ็นเตอร์แนวตั้งสามารถแบ่ง ได้เป็น 2 ประเภทใหญ่ตามกลไกการเคลื่อนที่ด้วยแกน X ได้แก่ 1 ใช้โต๊ะ (Table) สำหรับหมุนชิ้นงาน 2 ใช้ หัวเพลาขับ (Spindle Head) สำหรับหมุนชิ้นงาน 1 กรณีใช้โต๊ะ (Table) สำหรับหมุนชิ้นงาน (ภาพที่ 1-1): ส่วนที่อยู่ตำแหน่งล่างสุดและเป็นฐานรองคือ “ แท่นเครื่อง (Bed)” ซึ่งแท่นเครื่อง (Bed) นั้นเป็นฐานรองเพื่อรองรับเครื่องมือกลทั้งหมด (ตัวเครื่อง) และแท่นที่ จะเคลื่อนที่ไปในแกน Y ตามรางนำทางบนแท่นเครื่อง (Bed) ก็คือ “หมอนรอง (Saddle)” นอกจากนั้น แท่นที่ จะเคลื่อนที่ไปในแกน X ตามรางนำทางของหมอนรอง (Saddle) ก็คือ “โต๊ะ (Table)” นั่นเอง ถัดมา ชิ้นส่วนที่อยู่บนแท่นเครื่อง (Bed) และเคลื่อนที่ออกในแนวตั้งคือ “ เสา (Column)” และส่วนที่จะ เคลื่อนที่ไปในแกน Z ตามรางนำทางของเสา (Column) ก็คือ “หัวเพลาขับ (Spindle Head)” นั่นเอง หัวเพลา ขับ (Spindle head) คือส่วนมีเพลาขับ (Spindle) ประกอบอยู่ในตัว 2 กรณีใช้หัวเพลาขับ (Spindle Head) สำหรับหมุนชิ้นงาน (ภาพที่ 1-2): ส่วนที่อยู่ตำแหน่งล่างสุดและ เป็นฐานรองคือ “แท่นเครื่อง (Bed)” และแท่นที่จะเคลื่อนที่ไปในแกน Y ตามรางนำทางบนแท่นเครื่อง (Bed) ก็คือ “โต๊ะ (Table)” ชิ้นส่วนที่อยู่บนแท่นเครื่อง (Bed) และเคลื่อนที่ออกในแนวตั้งคือ “เสา (Column)” และ แท่นที่จะเคลื่อนที่ไปในแกน