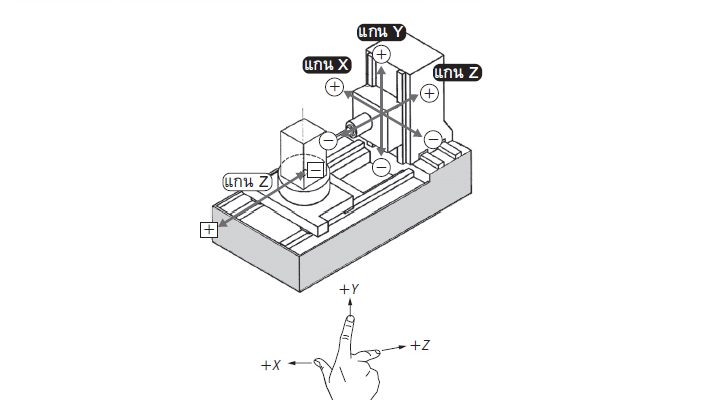
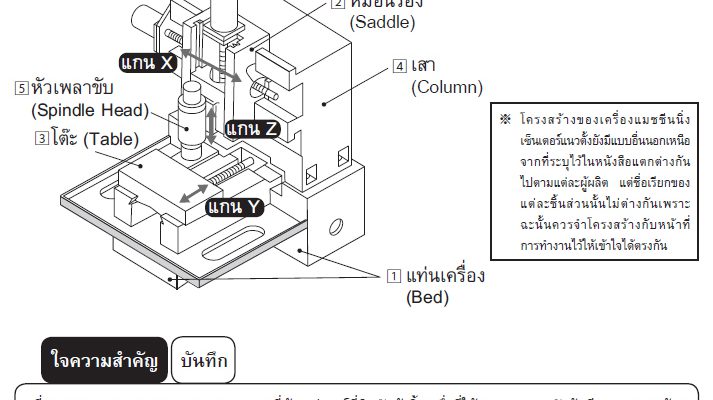
เครื่องแมชชีนนิ่งเซ็นเตอร์จะเคลื่อนที่อุปกรณ์ตัด (เพลาขับ) และโต๊ะตามค่าพิกัด เพราะเหตุนั้นการที่จะเดินเครื่อง แมชชีนนิ่งเซ็นเตอร์ต้องทราบเกี่ยวกับระบบพิกัดซึ่งเป็นพื้นฐานของตัวเลขพิกัดไว้ก่อน 1 การเคลื่อนที่เป็นเส้นตรงของเครื่องแมชชีนนิ่งเซ็นเตอร์ การเคลื่อนที่เป็นเส้นตรงของเครื่องแมชชีนนิ่งเซ็นเตอร์ประกอบไปด้วยแกน X แกน Y แกน Z ทั้งหมด 3 แกน เครื่อง แมชชีนนิ่งเซ็นเตอร์แนวตั้งและเครื่องแมชชีนนิ่งเซ็นเตอร์ 5 แกนหากมองตัวเครื่องจากด้านหน้า ซ้ายขวาจะเป็นแกน X หน้าหลังจะเป็นแกน Y ส่วนบนล่างจะเป็นแกน Z (ภาพที่ 1-3) เครื่องแมชชีนนิ่งเซ็นเตอร์แนวนอนหากมองตัวเครื่องโดยอยู่ตรงข้ามกับเพลาขับ ซ้ายขวาจะเป็นแกน X หน้าหลังจะ เป็นแกน Z ส่วนบนล่างจะเป็นแกน Y เครื่องแมชชีนนิ่งเซ็นเตอร์แบบเสาคู่หากมองตัวเครื่องจากด้านหน้า หน้าหลังจะเป็นแกน X ซ้ายขวาจะเป็นแกน Y ส่วนบนล่างจะเป็นแกน Z (ภาพที่ 1-4) แกนที่เคลื่อนที่ผ่านเพลาขับจะเป็นแกน Z ไม่ว่าจะเป็นเครื่องจักรกลชนิดใด นอกเรื่องจากเดิมมาสักนิด เครื่องกลึงเองก็มีแกน Z เป็นแกนที่เคลื่อนที่ผ่านเพลาขับ (แกนที่เชื่อมกับชุดยันศูนย์ ท้ายกับเพลาขับ) แต่ละแกนจะมีทิศทางบวก ทิศทางลบ แนวความคิดนี้ตาม “กฎมือขวา 1” ทำมือขวาตามภาพเทียบ หัวเพลาขับโดยนิ้วโป้งเป็นแกน X นิ้วชี้เป็นแกน Y นิ้วกลางเป็นแกน Z แล้วทิศทางที่นิ้วชี้ไปคือทิศทางบวก ทิศทางตรง ข้ามกันคือทิศทางลบ เครื่องจักรกลนั้นจะเอาการเคลื่อนไหวของหัวเพลาขับเป็นมาตรฐานในการดูทิศทางบวก ทิศทางลบ 2 ทิศทางของระบบพิกัด จุดนี้ควรระวัง (ส่วนนี้เป็นกับดัก!) หัวเพลาขับถูกยึดไว้อยู่ที่ตรงกลางของเครื่องแมชชีนนิ่งเซ็นเตอร์ แต่ตำแหน่งใน การเคลื่อนที่เป็นเส้นตรงจะแตกต่างกันไปตามผู้ผลิต เช่น เครื่องที่ทั้ง 3 แกนเคลื่อนที่โดยโต๊ะ หรือหัวเพลาขับเคลื่อนที่ เฉพาะแกน Z (1 แกน) และแกน X แกน Y (2 แกน) เคลื่อนที่โดยโต๊ะ เป็นต้น ยกตัวอย่างเช่น ในเครื่องแมชชีนนิ่งเซ็นเตอร์แนวตั้งที่โต๊ะเคลื่อนที่ไปในทิศทางของแกน X กับแกน Y ทิศทางบวก และทิศทางลบของแต่ละแกนจะตรงกันข้ามกับทิศทางที่นำการเคลื่อนไหวของเพลาขับมาเป็นพื้นฐาน (กฎมือขวา) แกน X (ทิศทางซ้ายขวา) ทิศทางที่เคลื่อนที่ไปยังด้านซ้ายเทียบต่อหัวเพลาขับจะเป็นทิศทางบวก และทิศทางที่เคลื่อนที่ไปยัง ด้านขวาเทียบต่อหัวเพลาขับจะเป็นทิศทางลบ ส่วนนี้หากพิจารณาจากการเทียบกันแล้ว